Autonomous Soccer Player Robots

Participating in the international RoboCup competitions as a team of four, we faced the challenge of
developing two autonomous soccer-playing robots. These robots were designed to follow a ball, defend
their goal, and score by shooting the ball into the opponent's goal. We implemented image
processing for
ball detection and employed efficient algorithms to create a highly accurate and functional system.
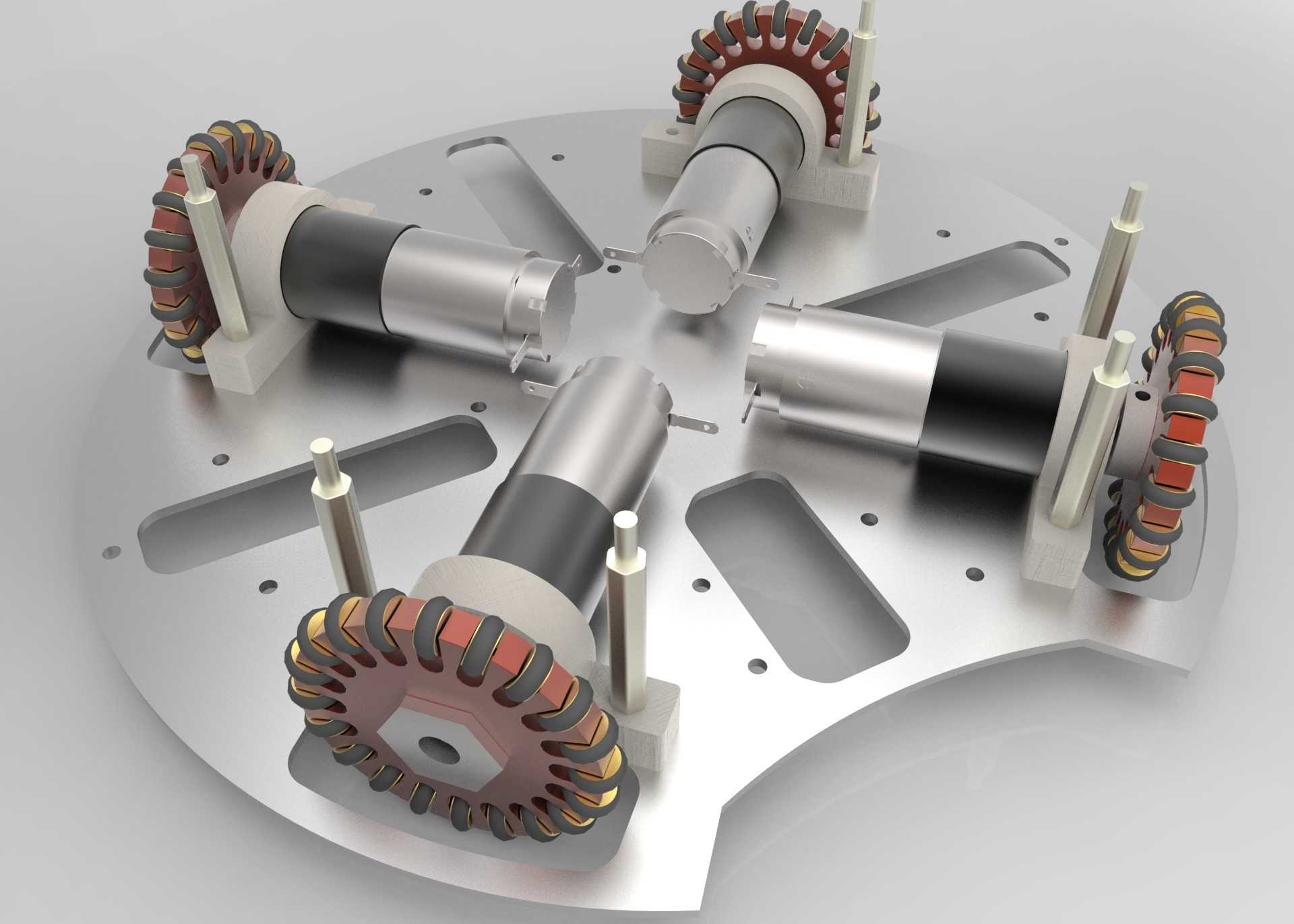
As the team captain, I was responsible for overseeing both the hardware and software design of our
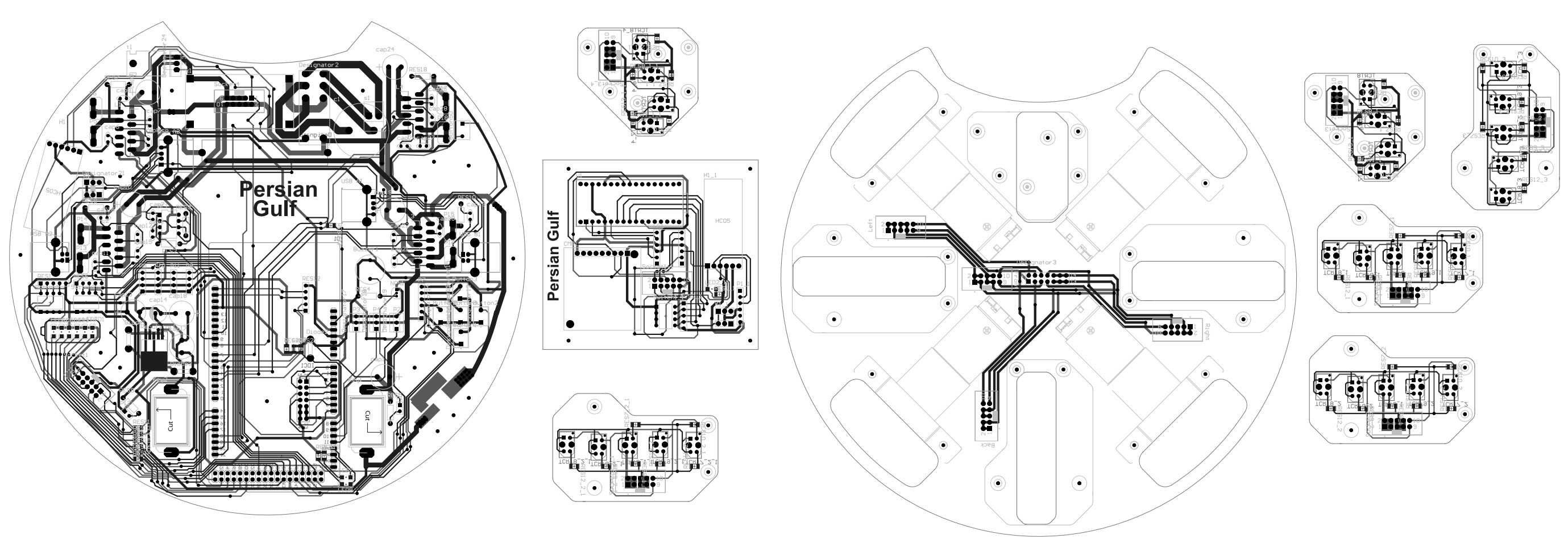
robots, utilizing SolidWorks, as well as designing the electronic circuits and PCB
layouts using
Altium Designer. I also participate in developing the algorithms using C++. This resulted
in our team
being
awarded the 'Best Technical Team' award in the 2018 competitions for exceptional hardware and software
design.
My Role
I had the honor of leading our team in various international and national robotics competitions, including IranOpen national competitions, RoboCup Asia-Pacific 2017 in Thailand, and RoboCup Canada 2018. My primary responsibility in the technical domain involved hardware design, as well as the design of PCBs and electronic circuits. I engaged in researching different components and testing various prototypes to determine the most effective structure. This included deciding which electronic modules to select, strategizing their arrangement to minimize interference from each other's noise, and ensuring that the more vulnerable modules could be quickly replaced during competitions to avoid losing points. I also focused on identifying which processor was best suited for image processing and determining the most appropriate protocol for different components. Additionally, I contributed to the development of our algorithms such as ball following, and sideline detector.Documentation
For more details about the process and the challenges please refer to this report: TDP (Team Description Paper)
Winter 2024